Experiment Overview
Gyroscopes are at the heart of inertial navigation systems, spacecraft attitude control, and platform stabilization for cameras, antennas, and weapons systems. A spinning gyroscope resists angular displacement through gyroscopic precession — but without active feedback control, external disturbances cause the deflection angle to wander unpredictably. This lab modeled the open-loop gyroscope dynamics, designed a PI controller to regulate deflection angle, and experimentally demonstrated the dramatic difference between controlled and uncontrolled system behavior when the base is disturbed.
- Derive the closed-loop transfer function for a PI-controlled rotary gyroscope from the open-loop plant model
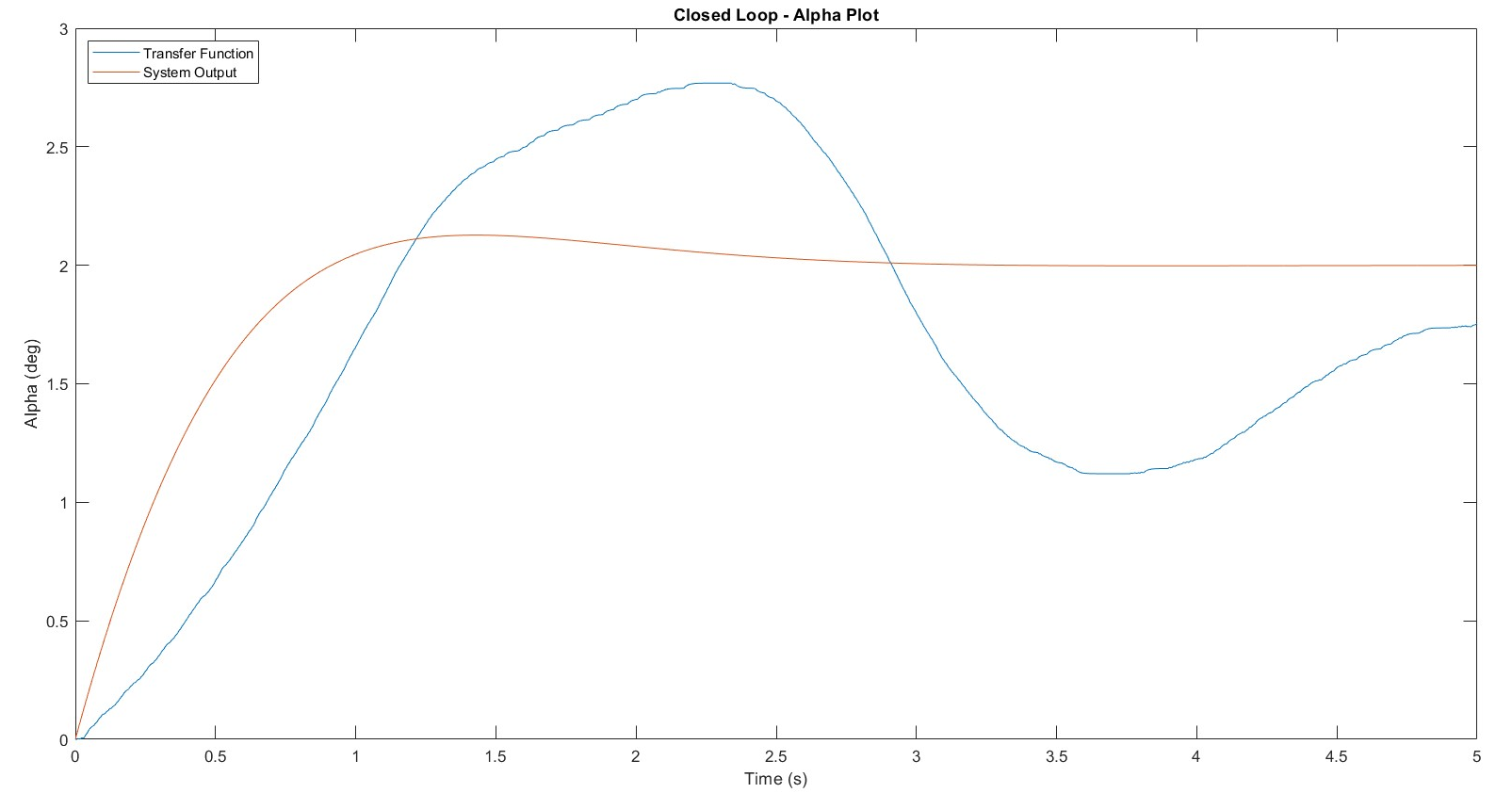
- Design PI gains to track a 2° deflection reference angle α with specified second-order transient behavior
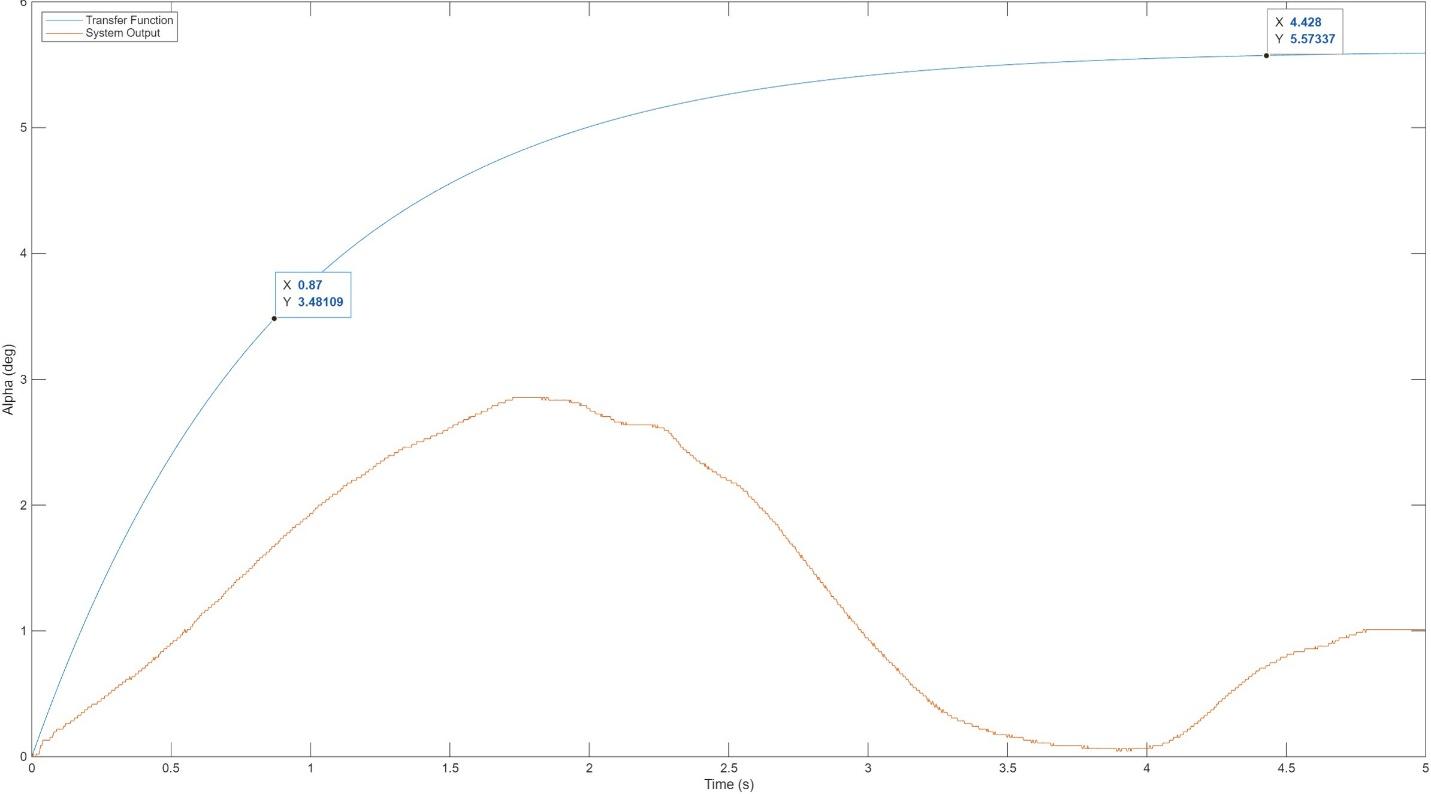
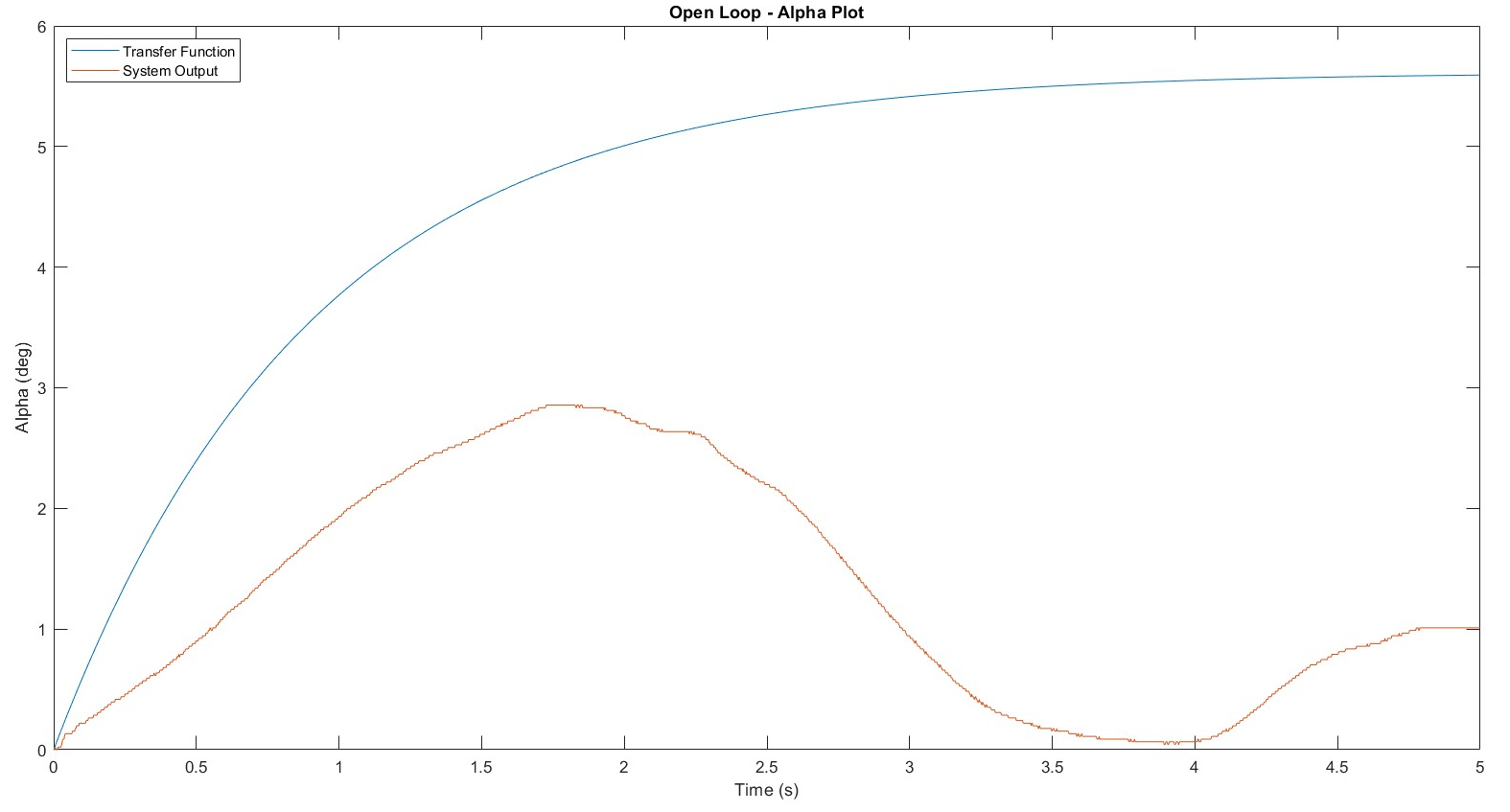
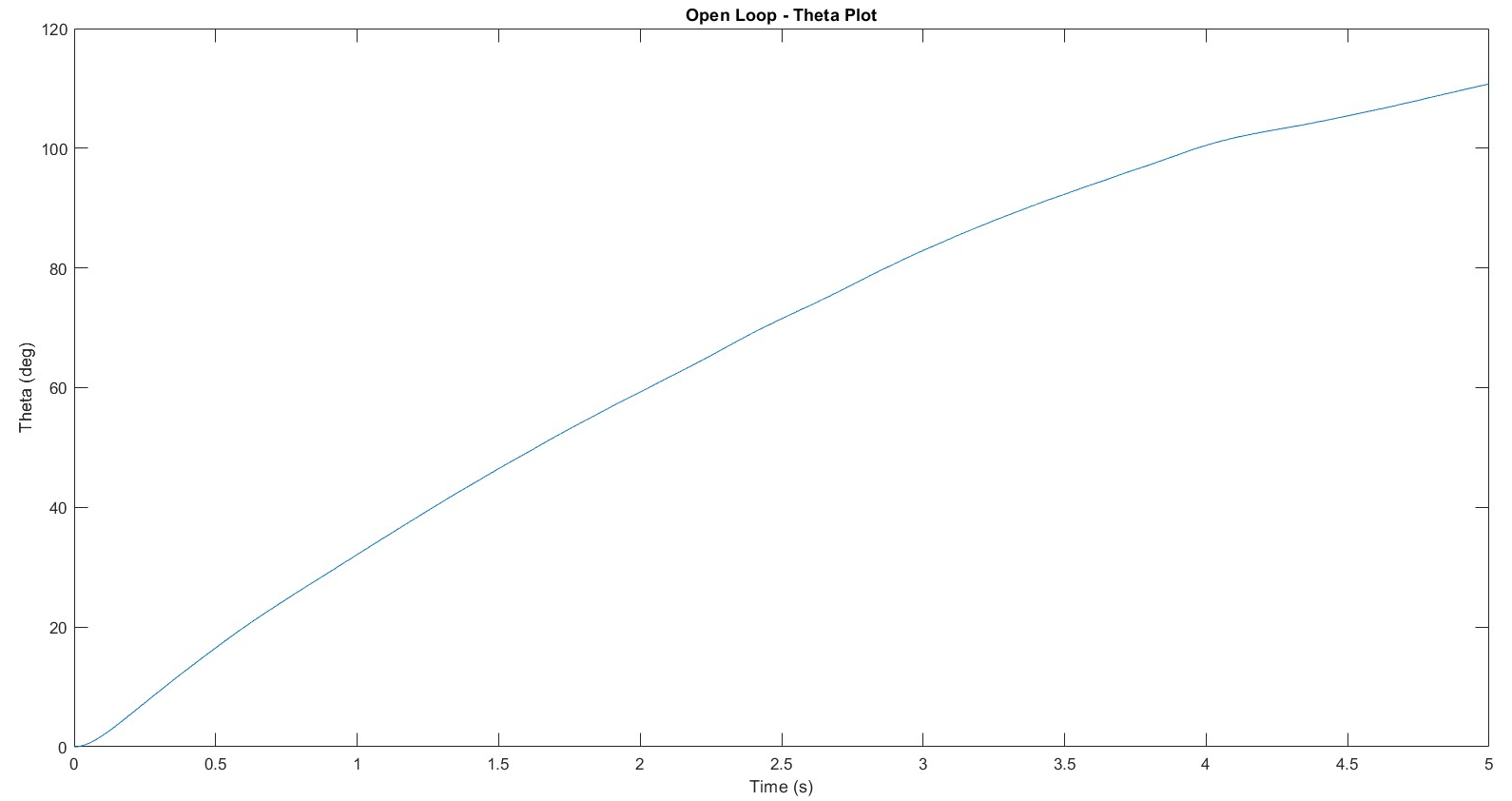
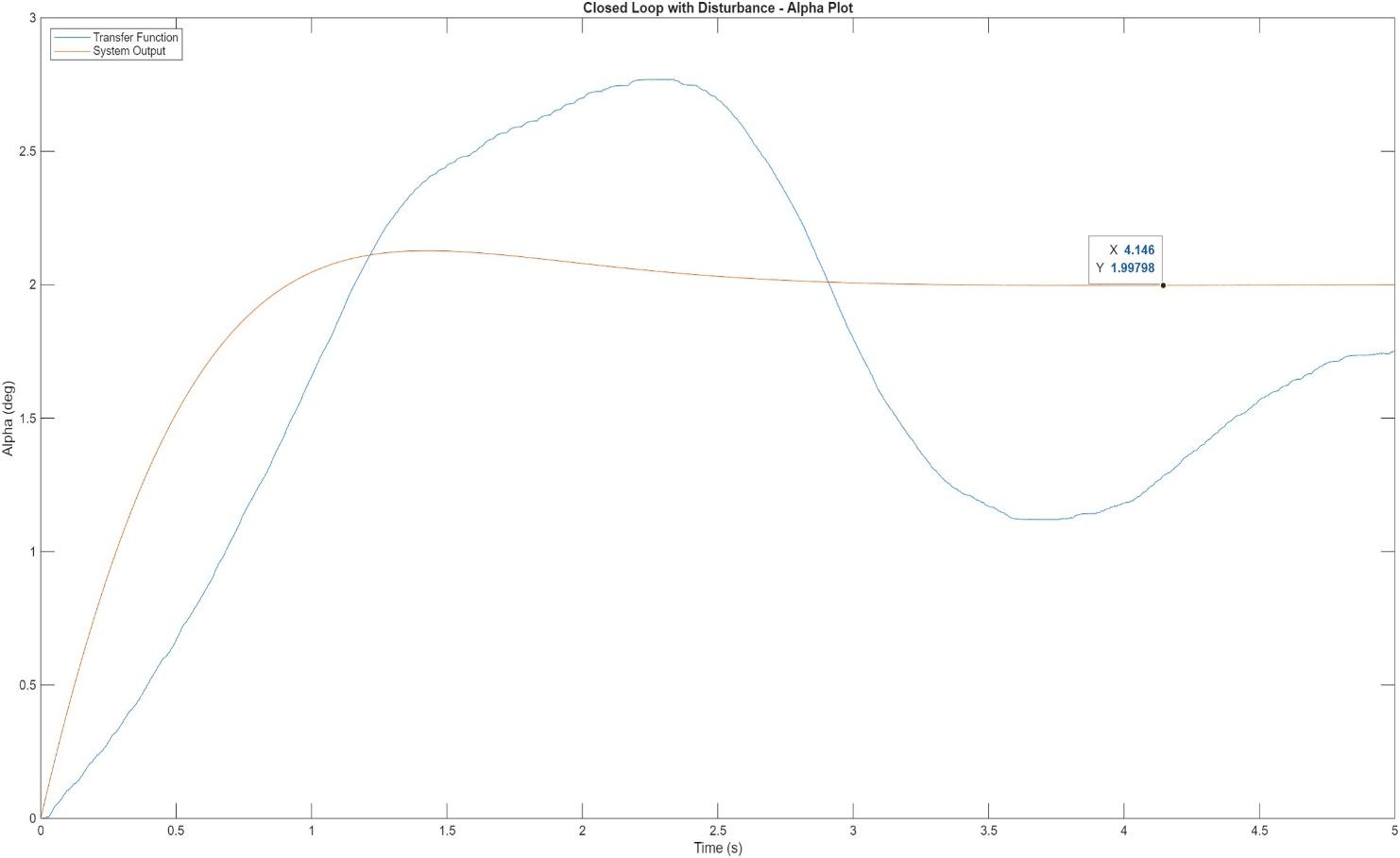
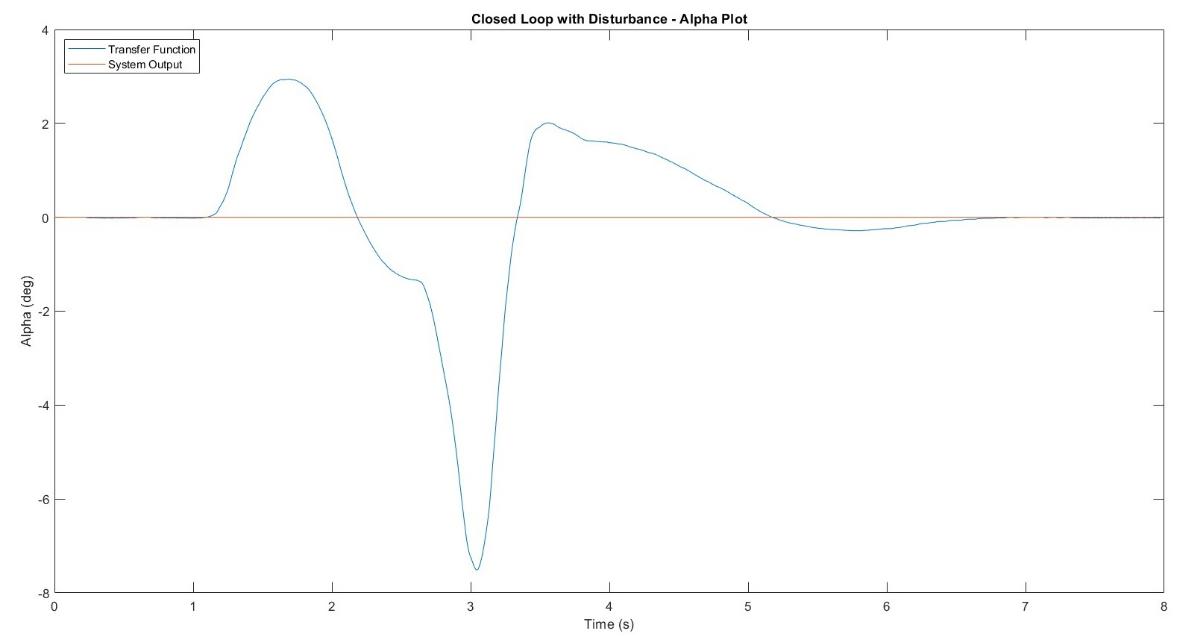
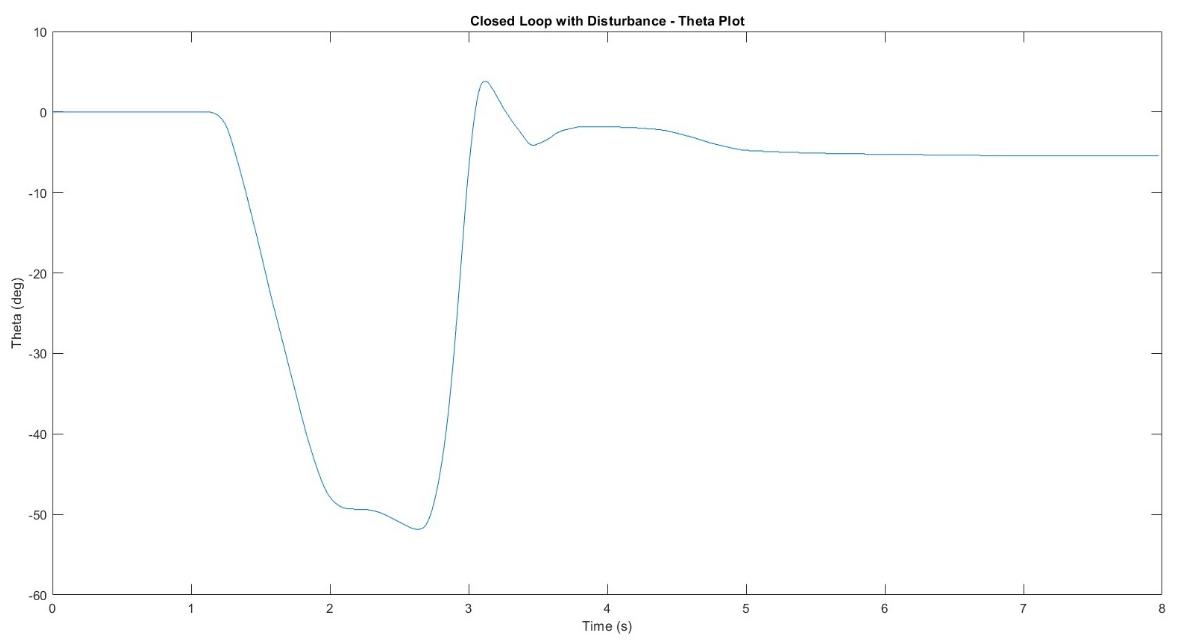
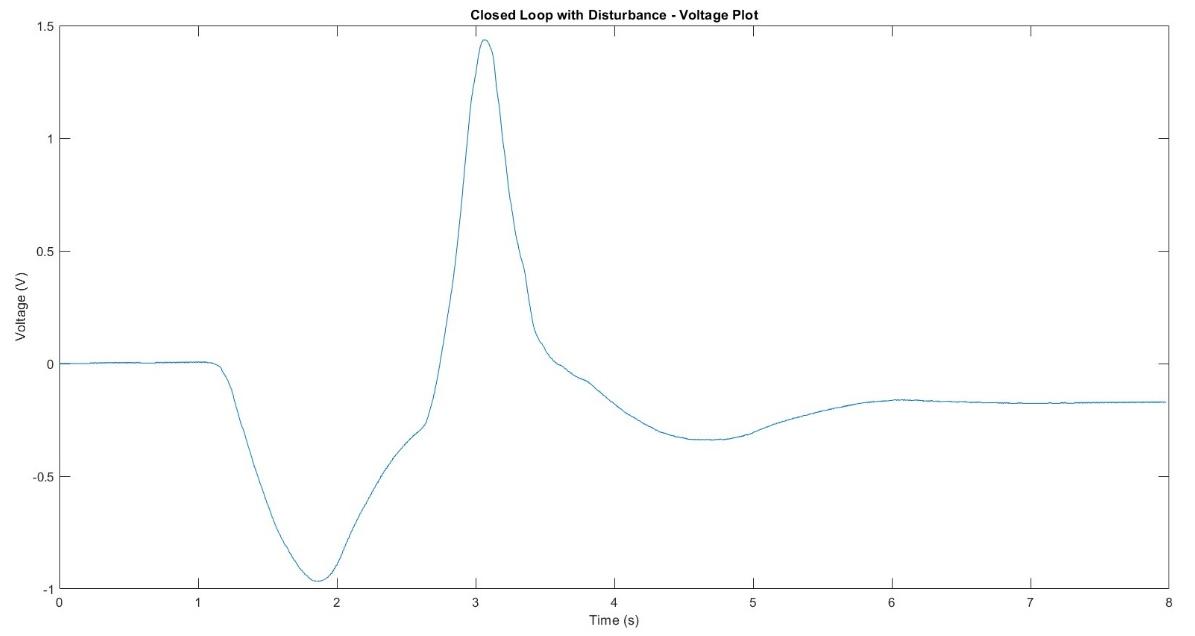
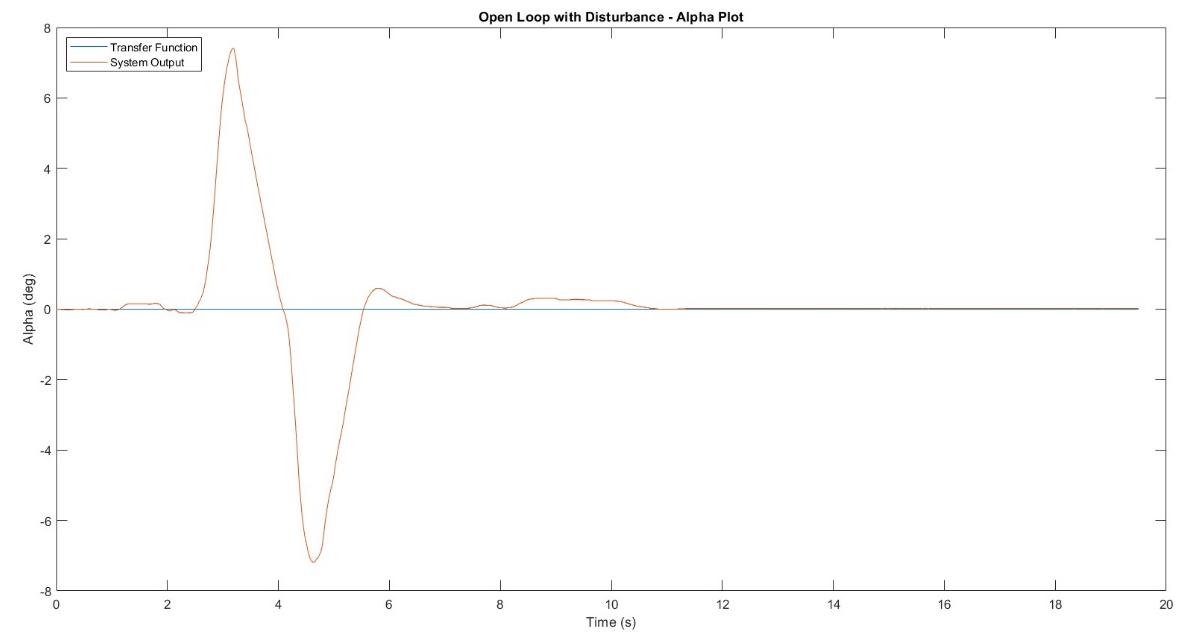
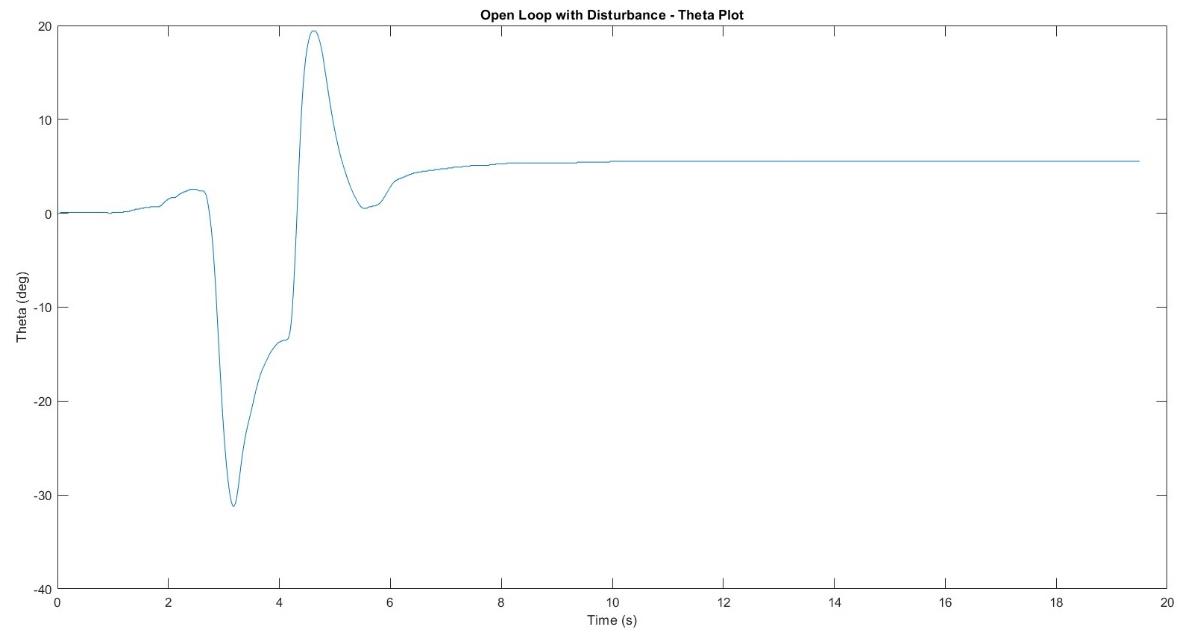
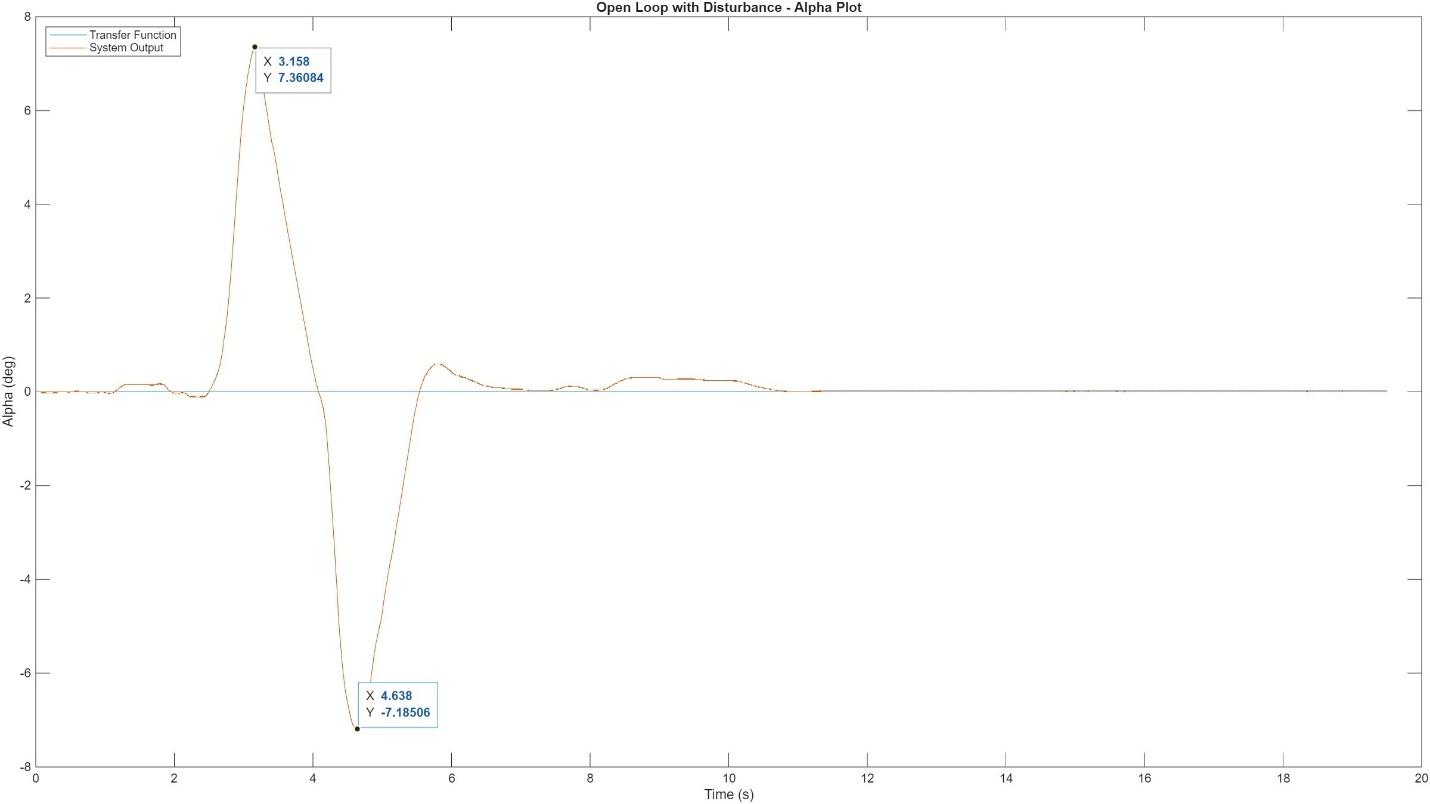
- Compare the open-loop and closed-loop responses to base rotation disturbances
- Verify system stability for both configurations using the Routh-Hurwitz criterion